Inspired by the biomechanics of real caterpillars, researchers at North Carolina State University have engineered a crawling robot. This soft robot can move forward, backward and slip through narrow gaps like slipping under a door.
The 9-cm (3.5-in) long soft-bodied robot is modeled after the caterpillar of the mother-of-pearl moth
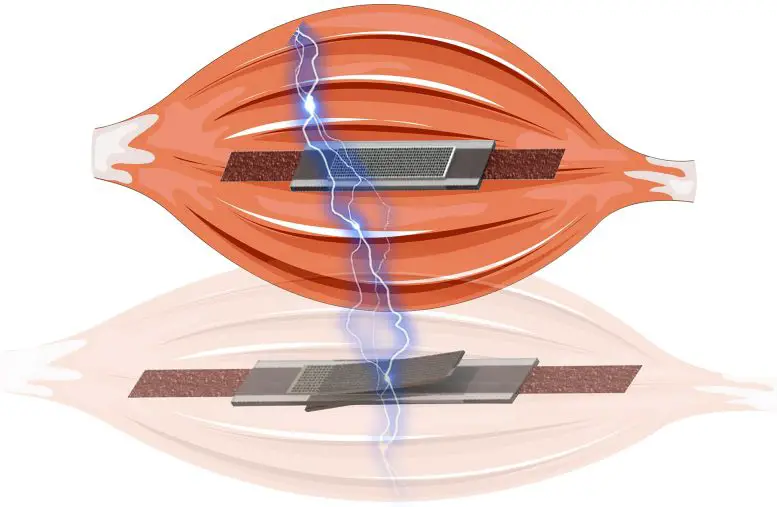
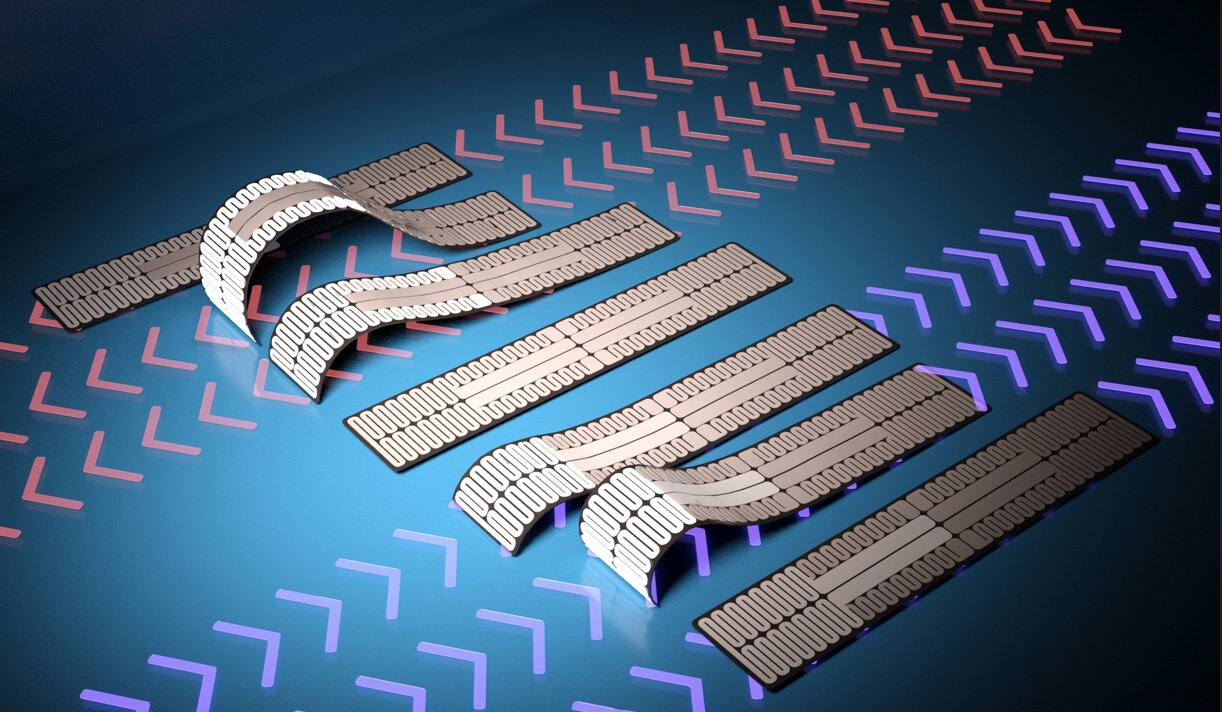
A novel pattern of silver nanowires uses heat to dictate the way the robot bends, allowing users to steer it in any direction they desire.
Yong Zhu, the corresponding author of a paper on the work, says “We’ve drawn inspiration from the caterpillar’s biomechanics to mimic that local curvature and use nanowire heaters to control similar curvature and movement in the caterpillar-bot.
Researchers say that engineering soft robots that can move in two different directions is not an easy feat, but the team was able to do so with the help of embedded nanowire heaters.
Zhu said “The embedded nanowire heaters allow us to control the movement of the robot in two ways. We can control which sections of the robot bend by controlling the pattern of heating in the soft robot. And we can control the extent to which those sections bend by controlling the amount of heat being applied.”
The soft bot’s body is made of two stacked layers of different polymers. The top layer expands when exposed to heat but the bottom one contracts when exposed to heat. It would move forward and backward by applying an electric current to different lead points.