When I was growing up, Disney pretty much stuck to making awesome television shows, theme parks, and movies.
They were great at those things.
Now, Disney wears many hats, one of them being funding the development of robotics and robotics research.
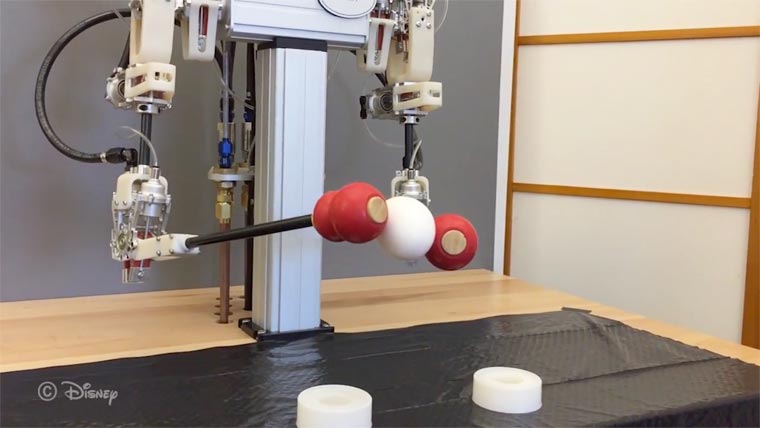
Disney’s new remotely operated robot is rather impressive in the fact that it can replicate human movement and thread a needle, catch a balloon without popping it, and even move an egg without breaking it.
The research team, which is comprised of researchers from Northeastern University, The Catholic University of America, and Disney Research Pittsburgh, utilized air and water to create a configuration that “achieves the high stiffness of a water-filled transmission with half the number of bulky hydraulic lines.”
The remotely operated robot also features enough dexterity to play the xylophone, so it would seem there is only one logical, delicate task left for the robot to perform.
Open heart surgery.
YouTube Description:
We present a new type of hydrostatic transmission that uses a hybrid air-water configuration, analogous to N+1 cable-tendon transmissions, using N hydraulic lines and 1 pneumatic line for a system with N degrees of freedom (DOFs). The common air-filled line preloads all DOFs in the system, allowing bidirectional operation of every joint. This configuration achieves the high stiffness of a water-filled transmission with half the number of bulky hydraulic lines. We implemented this transmission using pairs of rolling-diaphragm cylinders to form rotary hydraulic actuators, with a new design achieving a 600-percent increase in specific work density per cycle.
These actuators were used to build a humanoid robot with two 4-DOF arms, connected via the hydrostatic transmission to an identical master. Stereo cameras mounted on a 2-DOF servo-controlled neck stream live video to the operator’s head-mounted display, which in turn sends the real-time attitude of the operator’s head to the neck servos in the robot. The operator is visually immersed in the robot’s physical workspace, and through the bilateral coupling of the low-impedance hydrostatic transmission, directly feels interaction forces between the robot and external environment. We qualitatively assessed the performance of this system for remote object manipulation and use as a platform to safely study physical human-robot interaction.
Link to publication page: https://www.disneyresearch.com/publication/a-hybrid-hydrostatic-transmission-and-human-safe-haptic-telepresence-robot/